>> P.439
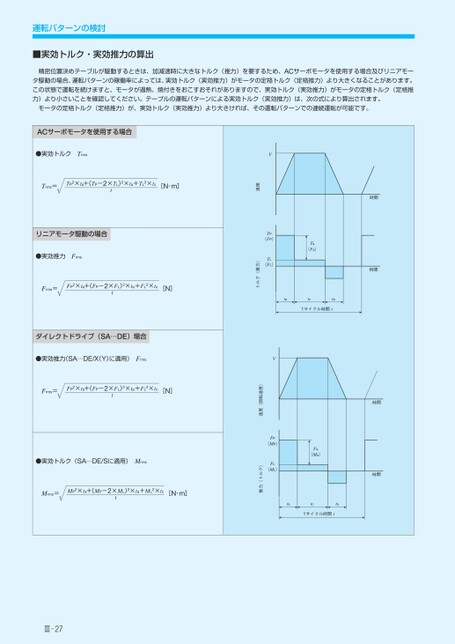
運転パターンの検討■実効トルク・実効推力の算出精密位置決めテーブルが駆動するときは、加減速時に大きなトルク(推力)を要するため、ACサーボモータを使用する場合及びリニアモータ駆動の場合、運転パターンの稼働率によっては、実効トルク(実効推力)がモータの定格トルク(定格推力)より大きくなることがあります。この状態で運転を続けますと、モータが過熱、焼付きをおこすおそれがありますので、実効トルク(実効推力)がモータの定格トルク(定格推力)より小さいことを確認してください。テーブルの運転パターンによる実効トルク(実効推力)は、次の式により算出されます。モータの定格トルク(定格推力)が、実効トルク(実効推力)より大きければ、その運転パターンでの連続運転が可能です。時間時間時間時間Ta(Fa)tatcta1サイクル時間tFa(Ma)tatcta1サイクル時間tVTP(FP)TL(FL)速度トルク(推力)VFP(MP)FL(ML)速度(回転速度)推力(トルク)ACサーボモータを使用する場合●実効トルクTrmsTP2×ta+(TP-2×TL)2×ta+TL2×tc[N・m]tTrms=リニアモータ駆動の場合●実効推力FrmsFP2×ta+(FP-2×FL)2×ta+FL2×tc[N]tFrms=ダイレクトドライブ(SA…DE)場合●実効推力(SA…DE/X(Y)に適用)FrmsFP2×ta+(FP-2×FL)2×ta+FL2×tc[N]tFrms=●実効トルク(SA…DE/Sに適用)MrmsMP2×ta+(MP-2×ML)2×ta+ML2×tc[N・m]tMrms=Ⅲ27
 | <
| <  |
|  > |
> |  >>
>>