>> P.302
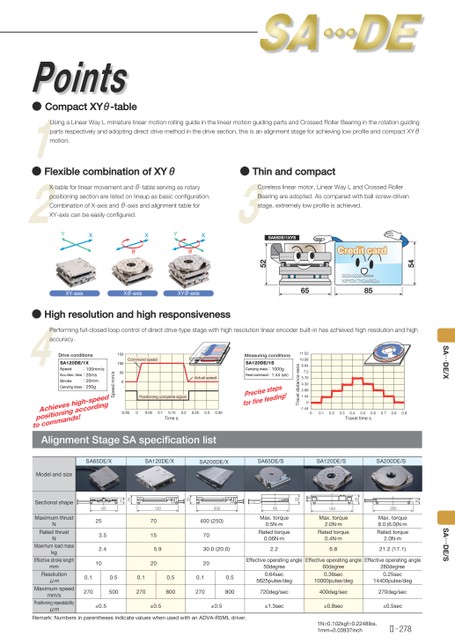
1N=0.102kgf=0.2248lbs.1mm=0.03937inch●CompactXYθ-tablePoints12UsingaLinearWayLminiaturelinearmotionrollingguideinthelinearmotionguidingpartsandCrossedRollerBearingintherotationguidingpartsrespectivelyandadoptingdirectdrivemethodinthedrivesection,thisisanalignmentstageforachievinglowprofileandcompactXYθmotion.●FlexiblecombinationofXYθ●ThinandcompactX-tableforlinearmovementandθ-tableservingasrotarypositioningsectionarelistedonlineupasbasicconfiguration.CombinationofX-axisandθ-axisandalignmenttableforXY-axiscanbeeasilyconfigured.Corelesslinearmotor,LinearWayLandCrossedRollerBearingareadopted.Ascomparedwithballscrew-drivenstage,extremelylowprofileisachieved.300.10.20.30.40.50.60.70.80.9Traveltimes11.5210.088.647.25.764.322.881.440Traveldistancesecs-1.44MeasuringconditionsSA120DE/1SCarryingmassFeedcommand:1.44sec:1000gPrecisestepsforfinefeeding!CommandspeedActualspeedPositioningcompletesignalTimesSpeedmm/sXY-axisXθ-axisXYθ-axisCreditcard●HighresolutionandhighresponsivenessPerformingfull-closedloopcontrolofdirectdrive-typestagewithhighresolutionlinearencoderbuilt-inhasachievedhighresolutionandhighaccuracy.4DriveconditionsSA120DE/1XSpeedAcc./dec.timeStrokeCarryingmass:100mm/s:20ms:20mm:250gAchieveshigh-speedpositioningaccordingtocommands!AlignmentStageSAspecificationlistSA65DE/XSA120DE/XSA200DE/XSA65DE/SSA120DE/SSA200DE/S30252230251565253.52.41012070155.9200.12700.55000.12700.5800200400(250)7065Max.torque0.5N·mRatedtorque0.06N·m30.0(20.0)2.2120Max.torque2.0N·mRatedtorque0.4N·m6.8200Max.torque8.0(6.0)N·mRatedtorque2.0N·m21.2(17.1)200.12700.5800EffectiveoperatingangleEffectiveoperatingangleEffectiveoperatingangle50degree0.64sec60degree0.36sec280degree0.25sec5625pulse/deg10000pulse/deg14400pulse/deg720deg/sec400deg/sec270deg/sec±0.5±0.5±0.5±1.3sec±0.8sec±0.5secModelandsizeSectionalshapeMaximumthrustNRatedthrustNMaximumloadmasskgEffectivestrokelengthmmResolutionμmMaximumspeedmm/sPositioningrepeatabilityμmRemark:NumbersinparenthesesindicatevalueswhenusedwithanADVA-R5MLdriver.Ⅱ278
 | <
| <  |
|  > |
> |  >>
>>