>> P.311
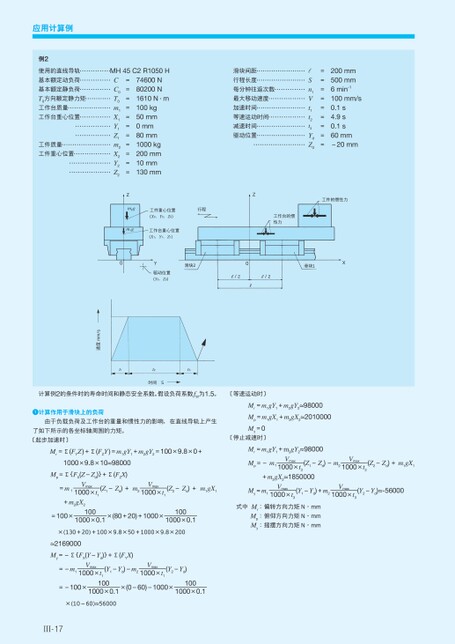
应用计算例例2使用的直线导轨基本额定动负荷基本额定静负荷T0方向额定静力矩工作台质量工作台重心位置工件质量工件重心位置MH45C2R1050HCC0T0m1X1Y1Z1m2X2Y2Z2===========74600N80200N1610N·m100kg50mm0mm80mm1000kg200mm10mm130mm滑块间距行程长度每分钟往返次数最大移动速度加速时间等速运动时间减速时间驱动位置rSn1Vt1t2t3YdZd=========200mm500mm6min-1100mm/s0.1s4.9s0.1s60mm-20mmZm2gm1g行程工件重心位置(X2、Y2、Z2)工作台重心位置(X1、Y1、Z1)Z工件的惯性力工作台的惯性力0Y驱动位置(Yd、Zd)滑块20滑块1XR/2R/2R计算例2的条件时的寿命时间和静态安全系数。假设负荷系数fW为1.5。〔等速运动时〕t1t2t3时间S速度mm/s计算作用于滑块上的负荷由于负载负荷及工作台的重量和惯性力的影响,在直线导轨上产生了如下所示的各坐标轴周围的力矩。〔起步加速时〕Mr=Σ(FYZ)+Σ(FZY)=m1gY1+m2gY2=100×9.8×0+1000×9.8×10≈98000Mp=Σ{FX(Z-Zd)}+Σ(FZX)=m1Vmax—1000×t1+m2gX2(Z1-Zd)+m2Vmax—1000×t1(Z2-Zd)+m1gX1=100×100—1000×0.1×(80+20)+1000×100—1000×0.1×(130+20)+100×9.8×50+1000×9.8×200≈2169000My=-Σ{FX(Y-Yd)}+Σ(FYX)=-m1Vmax—1000×t1(Y1-Yd)-m2Vmax—1000×t1(Y2-Yd)Mr=m1gY1+m2gY2≈98000Mp=m1gX1+m2gX2≈2010000My=0〔停止减速时〕Mr=m1gY1+m2gY2≈98000Mp=-m1Vmax—1000×t3(Z1-Zd)-m2Vmax—1000×t3(Z2-Zd)+m1gX1+m2gX2≈1850000My=m1Vmax—1000×t3(Y1-Yd)+m2Vmax—1000×t3(Y2-Yd)≈-56000式中Mr:偏转方向力矩N·mmMp:俯仰方向力矩N·mmMy:摇摆方向力矩N·mm=-100×100—1000×0.1×(0-60)-1000×100—1000×0.1×(10-60)≈56000Ⅲ-17
 | <
| <  |
|  > |
> |  >>
>>