>> P.284
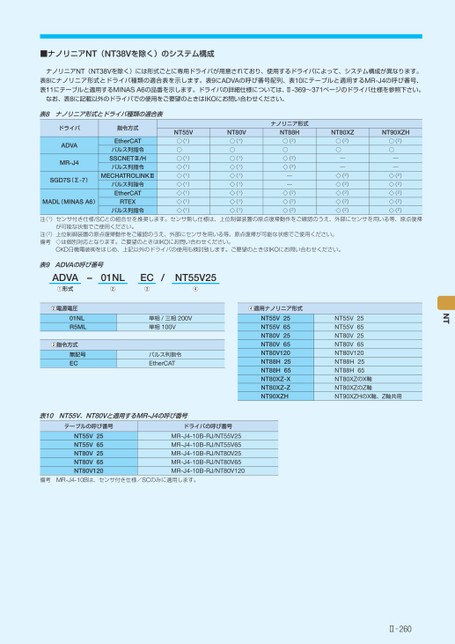
■ナノリニアNT(NT30VおよびNT38Vを除く)のシステム構成ナノリニアNT(NT30VおよびNT38Vを除く)には形式ごとに専用ドライバが用意されており、使用するドライバによって、システム構成が異なります。表10にナノリニア形式とドライバ種類の適合表を示します。表11にADVAの呼び番号配列、表12にテーブルと適用するMR-J4の呼び番号、表13にテーブルと適用するMINASA6の品番を示します。ドライバの詳細仕様については、Ⅱ-383およびⅡ-385~387ページのドライバ仕様を参照下さい。なお、表10に記載以外のドライバでの使用をご要望のときはIKOにお問い合わせください。表10ナノリニア形式とドライバ種類の適合表ドライバADVAMR-J4指令方式EtherCATパルス列指令SSCNETⅢ/Hパルス列指令EtherCATNCR-H(VPH)MECHATROLINKⅢSGD7S(Σ-7)MADL(MINASA6)パルス列指令MECHATROLINKⅢパルス列指令EtherCATRTEXパルス列指令NT55V○(1)○○(1)◇(1)◇(1)◇(1)◇(1)◇(1)◇(1)◇(1)◇(1)◇(1)NT80V○(1)○○(1)◇(1)◇(1)◇(1)◇(1)◇(1)◇(1)◇(1)◇(1)◇(1)ナノリニア形式NT88H○(2)○◇(2)◇(2)◇(2)◇(2)○(2)――◇(2)◇(2)◇(2)NT80XZ○(2)○―――――◇(2)◇(2)◇(2)◇(2)◇(2)NT90XZH○(2)○―――――◇(2)◇(2)◇(2)◇(2)◇(2)注(1)注(2)備考センサ付き仕様/SCとの組合せを推奨します。センサ無し仕様は、上位制御装置の原点復帰動作をご確認のうえ、外部にセンサを用いる等、原点復帰が可能な状態でご使用ください。上位制御装置の原点復帰動作をご確認のうえ、外部にセンサを用いる等、原点復帰が可能な状態でご使用ください。◇は個別対応となります。ご要望のときはIKOにお問い合わせください。上記以外のドライバの使用も検討致します。ご要望のときはIKOにお問い合わせください。表11ADVAの呼び番号ADVA–01NL●形式●EC●/NT55V25●●電源電圧01NLR5ML●指令方式無記号EC単相/三相200V単相100Vパルス列指令EtherCAT表12NT55V、NT80Vと適用するMR-J4の呼び番号テーブルの呼び番号NT55V25NT55V65NT80V25NT80V65NT80V120ドライバの呼び番号MR-J4-10B-RJ/NT55V25MR-J4-10B-RJ/NT55V65MR-J4-10B-RJ/NT80V25MR-J4-10B-RJ/NT80V65MR-J4-10B-RJ/NT80V120備考MR-J4-10Bは、センサ付き仕様/SCのみに適用します。●適用ナノリニア形式25NT55V65NT55V25NT80VNT80V65NT80V12025NT88HNT88H65NT80XZ-XNT80XZ-ZNT90XZH25NT55V65NT55V25NT80VNT80V65NT80V12025NT88HNT88H65NT80XZのX軸NT80XZのZ軸NT90XZHのX軸、Z軸共用Ⅱ260
 | <
| <  |
|  > |
> |  >>
>>