>> P.268
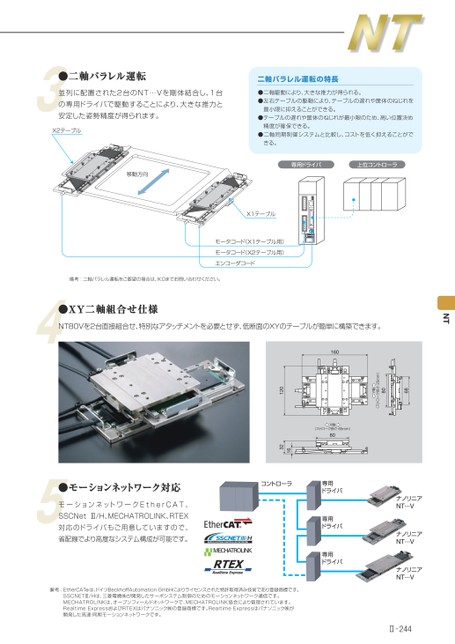
3●二軸パラレル運転並列に配置された2台のNT…Vを剛体結合し、1台の専用ドライバで駆動することにより、大きな推力と安定した姿勢精度が得られます。二軸パラレル運転の特長●二軸駆動により、大きな推力が得られる。●左右テーブルの駆動により、テーブルの遅れや筐体のねじれを最小限に抑えることができる。●テーブルの遅れや筐体のねじれが最小限のため、高い位置決め精度が確保できる。●二軸同期制御システムと比較し、コストを低く抑えることができる。備考:二軸パラレル運転をご要望の場合は、IKOまでお問い合わせください。●XY二軸組合せ仕様4NT80Vを2台直接組合せ、特別なアタッチメントを必要とせず、低断面のXYのテーブルが簡単に構築できます。5●モーションネットワーク対応モーションネットワークEtherCAT、SSCNetⅢ/H、MECHATROLINK、RTEX対応のドライバもご用意していますので、省配線でより高度なシステム構成が可能です。備考:EtherCATは、ドイツBeckhoffAutomationGmbHによりライセンスされた特許取得済み技術であり登録商標です。SSCNETⅢ/Hは、三菱電機㈱が開発したサーボシステム制御のためのモーションネットワーク通信です。MECHATROLINKは、オープンフィールドネットワークで、MECHATROLINK協会により管理されています。RealtimeExpressおよびRTEXはパナソニック㈱の登録商標です。RealtimeExpressはパナソニック㈱が開発した高速・同期モーションネットワークです。Ⅱ244
 | <
| <  |
|  > |
> |  >>
>>