>> P.406
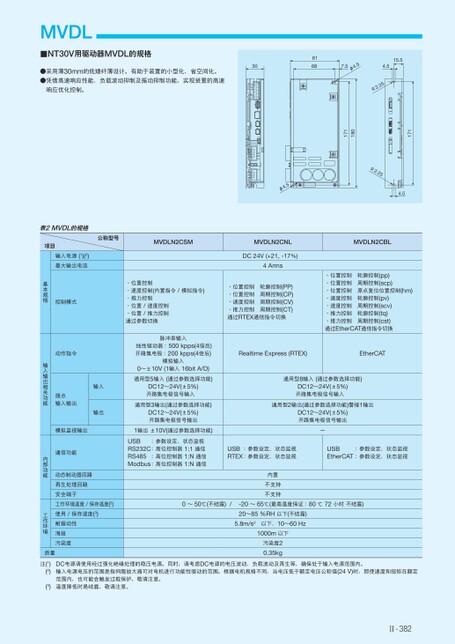
MVDL■NT30V用驱动器MVDL的规格●采用薄30mm的低矮纤薄设计。有助于装置的小型化、省空间化。●凭借高速响应性能、负载波动抑制及振动抑制功能,实现装置的高速响应优化控制。3081687.54.5φ15.54.552.2R1711801714.5R2.254.5φMVDLN2CSMMVDLN2CNLMVDLN2CBLDC24V(+21,-17%)4Arms·位置控制·速度控制(内置指令/模拟指令)·推力控制·位置/速度控制·位置/推力控制通过参数切换·位置控制轮廓控制(PP)·位置控制周期控制(CP)·速度控制周期控制(CV)·推力控制周期控制(CT)通过RTEX通信指令切换·位置控制轮廓控制(pp)·位置控制周期控制(scp)·位置控制原点复位位置控制(hm)·速度控制轮廓控制(pv)·速度控制周期控制(scv)·推力控制轮廓控制(tq)·推力控制周期控制(cst)通过EtherCAT通信指令切换脉冲串输入线性驱动器:500kpps(4倍后)开路集电极:200kpps(4倍后)模拟输入0~±10V(1输入16bitA/D)通用型5输入(通过参数选择功能)DC12~24V(±5%)开路集电极信号输入通用型3输出(通过参数选择功能)DC12~24V(±5%)开路集电极信号输出RealtimeExpress(RTEX)EtherCAT通用型8输入(通过参数选择功能)DC12~24V(±5%)开路集电极信号输入通用型2输出(通过参数选择功能)警报1输出DC12~24V(±5%)开路集电极信号输出ー模拟监视输出1输出±10V(通过参数选择功能)通信功能动态制动器回路再生处理回路安全端子工作环境温度/保存温度(3)使用/保存湿度(3)耐振动性海拔污染度USB:参数设定、状态监视RS232C:高位控制器1:1通信RS485:高位控制器1:N通信Modbus:高位控制器1:N通信USB:参数设定、状态监视RTEX:参数设定、状态监视USB:参数设定、状态监视EtherCAT:参数设定、状态监视内置不支持不支持0~50℃(不结露)/-20~65℃(最高温度保证:80℃72小时不结露)20~85%RH以下(不结露)5.8m/s2以下、10~60Hz1000m以下污染度20.35kgDC电源请使用经过强化绝缘处理的稳压电源。同时,请考虑DC电源的电压波动、负载波动及再生等,确保处于输入电源范围内。输入电源电压的范围是指伺服放大器可对电机进行功能性驱动的范围。根据电机规格不同,当电压低于额定电压公称值(24V)时,即使速度和扭矩在额定范围内,也可能会触发过载保护,敬请注意。温度降低时易结露,敬请注意。Ⅱ-382表2MVDL的规格项目输入电源(1)(2)最大输出电流公称型号控制模式动作指令接点输入输出输入输出基本规格输入输出相关功能内部功能工作环境质量注(1)(2)(3)
 | <
| <  |
|  > |
> |  >>
>>