>> P.284
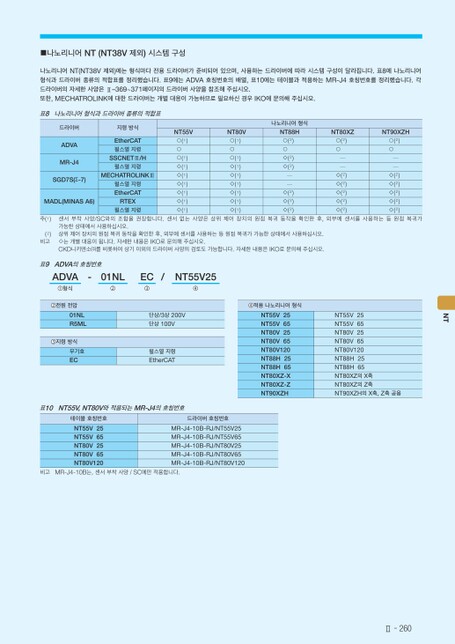
■나노리니어NT(NT30V및NT38V제외)시스템구성나노리니어NT(NT30V및NT38V제외)에는형식마다전용드라이버가준비되어있으며,사용하는드라이버에따라시스템구성이달라집니다.표10에나노리니어형식과드라이버종류의적합표를정리했습니다.표11에는ADVA호칭번호의배열,표12에는테이블과적용하는MR-J4호칭번호를정리했습니다.각드라이버의자세한사양은Ⅱ-383및Ⅱ-385~387페이지의드라이버사양을참조해주십시오.또한,MECHATROLINK에대한드라이버는개별대응이가능하므로필요하신경우IKO에문의해주십시오.표10나노리니어형식과드라이버종류의적합표드라이버ADVAMR-J4지령방식EtherCAT펄스열지령SSCNETⅢ/H펄스열지령EtherCATNCR-H(VPH)MECHATROLINKⅢSGD7S(Σ-7)MADL(MINASA6)펄스열지령MECHATROLINKⅢ펄스열지령EtherCATRTEX펄스열지령NT55VNT80V나노리니어형식NT88HNT80XZNT90XZH○(1)○○(1)◇(1)◇(1)◇(1)◇(1)◇(1)◇(1)◇(1)◇(1)◇(1)○(1)○○(1)◇(1)◇(1)◇(1)◇(1)◇(1)◇(1)◇(1)◇(1)◇(1)○(2)○◇(2)◇(2)◇(2)◇(2)○(2)――◇(2)◇(2)◇(2)○(2)○―――――◇(2)◇(2)◇(2)◇(2)◇(2)○(2)○―――――◇(2)◇(2)◇(2)◇(2)◇(2)주(1)(2)비고센서부착사양/SC와의조합을권장합니다.센서없는사양은상위제어장치의원점복귀동작을확인한후,외부에센서를사용하는등원점복귀가가능한상태에서사용하십시오.상위제어장치의원점복귀동작을확인한후,외부에센서를사용하는등원점복귀가가능한상태에서사용하십시오.◇는개별대응이됩니다.자세한내용은IKO로문의해주십시오.상기이외의드라이버사용도검토하고있습니다.자세한내용은IKO로문의해주십시오.표11ADVA의호칭번호ADVA-01NLEC/NT55V25①형식②③④②전원전압01NLR5ML③지령방식●무기호EC단상/3상200V단상100V펄스열지령EtherCAT표12NT55V,NT80V와적용되는MR-J4의호칭번호테이블호칭번호NT55V25NT55V65NT80V25NT80V65NT80V120드라이버호칭번호MR-J4-10B-RJ/NT55V25MR-J4-10B-RJ/NT55V65MR-J4-10B-RJ/NT80V25MR-J4-10B-RJ/NT80V65MR-J4-10B-RJ/NT80V120비고MR-J4-10B는,센서부착사양/SC에만적용합니다.④적용나노리니어형식25NT55V65NT55V25NT80VNT80V65NT80V120NT88H25NT88H65NT80XZ-XNT80XZ-ZNT90XZH25NT55V65NT55V25NT80VNT80V65NT80V120NT88H25NT88H65NT80XZ의X축NT80XZ의Z축NT90XZH의X축,Z축공용Ⅱ-260
 | <
| <  |
|  > |
> |  >>
>>