>> P.444
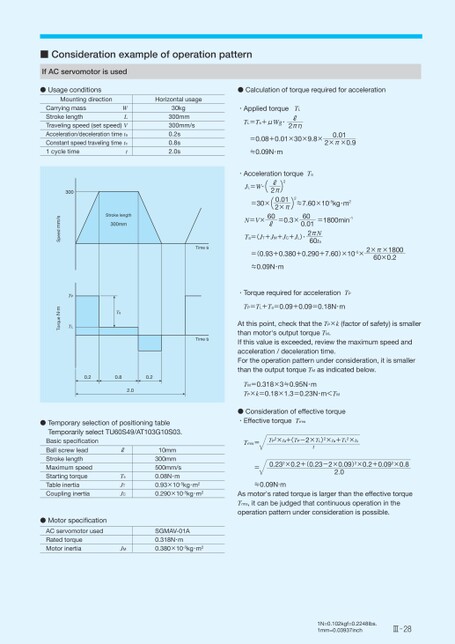
■ConsiderationexampleofoperationpatternIfACservomotorisused●UsageconditionsMountingdirectionHorizontalusageCarryingmassWStrokelengthLTravelingspeed(setspeed)VAcceleration/decelerationtimetaConstantspeedtravelingtimetc1cycletimet30kg300mm300mm/s0.2s0.8s2.0s●Calculationoftorquerequiredforacceleration・AppliedtorqueTLℓ2πηTL=Ts+μWg・=0.08+0.01×30×9.8×≒0.09N・m0.012×π×0.9・AccelerationtorqueTaℓ2π0.012×π≒7.60×10-5kg・m2JL=W・()2=30×()2N=V×Ta=(JT+JM+JC+JL)・=(0.93+0.380+0.290+7.60)×10-5×≒0.09N・m=0.3×=1800min-12πN60ta600.0160ℓ2×π×180060×0.2・TorquerequiredforaccelerationTPTP=TL+Ta=0.09+0.09=0.18N・mAtthispoint,checkthattheTP×k(factorofsafety)issmallerthanmotor'soutputtorqueTM.Ifthisvalueisexceeded,reviewthemaximumspeedandacceleration/decelerationtime.Fortheoperationpatternunderconsideration,itissmallerthantheoutputtorqueTMasindicatedbelow.TimesTimesStrokelength300mmTa300Speedmm/sTPTLTorqueN.m0.20.80.22.0●TemporaryselectionofpositioningtableTM=0.318×3≒0.95N・mTP×k=0.18×1.3=0.23N・m<TM●Considerationofeffectivetorque・EffectivetorqueTrmsℓTemporarilyselectTU60S49/AT103G10S03.BasicspecificationBallscrewleadStrokelengthMaximumspeedStartingtorqueTableinertiaCouplinginertia10mm300mm500mm/s0.08N・m0.93×10-5kg・m20.290×10-5kg・m2TsJTJC●MotorspecificationACservomotorusedRatedtorqueMotorinertiaJMSGMAV-01A0.318N・m0.380×10-5kg・m2Trms==TP2×ta+(TP-2×TL)2×ta+TL2×tct0.232×0.2+(0.23-2×0.09)2×0.2+0.092×0.82.0≒0.09NmAsmotor'sratedtorqueislargerthantheeffectivetorqueTrms,itcanbejudgedthatcontinuousoperationintheoperationpatternunderconsiderationispossible.Ⅲ28
 | <
| <  |
|  > |
> |  >>
>>