>> P.270
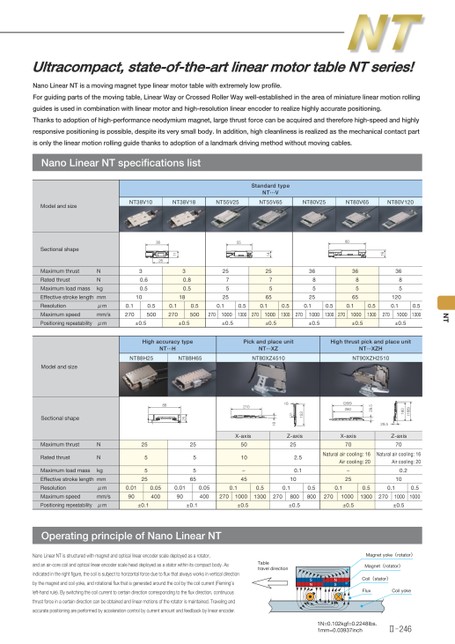
1N=0.102kgf=0.2248lbs.1mm=0.03937inchtlUracompact,state-of-the-artlinearmotortableNTseries!NanoLinearTMNTisamovingmagnettypelinearmotortablewithextremelylowprofile.Forguidingpartsofthemovingtable,LinearWayorCrossedRollerWaywell-establishedintheareaofminiaturelinearmotionrollingguidesisusedincombinationwithlinearmotorandhigh-resolutionlinearencodertorealizehighlyaccuratepositioning.Thankstoadoptionofhigh-performanceneodymiummagnet,largethrustforcecanbeacquiredandthereforehigh-speedandhighlyresponsivepositioningispossible,despiteitsverysmallbody.Inaddition,highcleanlinessisrealizedasthemechanicalcontactpartisonlythelinearmotionrollingguidethankstoadoptionofalandmarkdrivingmethodwithoutmovingcables.NanoLinearNTspecificationslistModelandsizeNT30V8NT30V20NT38V10NT38V18StandardtypeNT···V0.5500.80.53018±0.51138260.55000.1270.60.53010±0.5NT80V25NT80V65NT80V1200.55000.1270StandardtypeNT···VNT55V65SectionalshapeMaximumthrustNNkgRatedthrustMaximumloadmassEffectivestrokelengthmmμmmm/sμmResolutionMaximumspeedPositioningrepeatability30830.70.58±0.50.12700.55000.1270310.520±0.5ModelandsizeNT38V10NT38V18NT55V2536851200.10.5270100013000.5130016±0.5±0.53685253685650.10.50.11300270100055800.12700.55000.12700.5500±0.5±0.50.12701000±0.50.513000.12701000±0.50.513002701000±0.514257565257525.8300.518.6300.510113826HighaccuracytypeNT···HNT88H25NT88H65PickandplaceunitHighthrustpickandplaceunitNT···XZNT80XZ4510NT···XZHNT90XZH2510(168)16029.5Z-axis7029.5(268)260X-axis70Naturalaircooling:16Aircooling:20Naturalaircooling:16Aircooling:20-250.2100.58002700.10.50.11000±0.513002701000±0.50.51000Ⅱ246153518Z-axis252.50.1100.1800±0.518210X-axis5010-4525882555252555650.01900.054000.01900.05400±0.1±0.10.10.52701000±0.51300270SectionalshapeMaximumthrustRatedthrustNNMaximumloadmasskgEffectivestrokelengthmmμmResolutionMaximumspeedPositioningrepeatabilitymm/sμmModelandsizeSectionalshapeMaximumthrustRatedthrustNNkgMaximumloadmassEffectivestrokelengthmmμmResolutionmm/sμmMaximumspeedPositioningrepeatability
 | <
| <  |
|  > |
> |  >>
>>