>> P.289
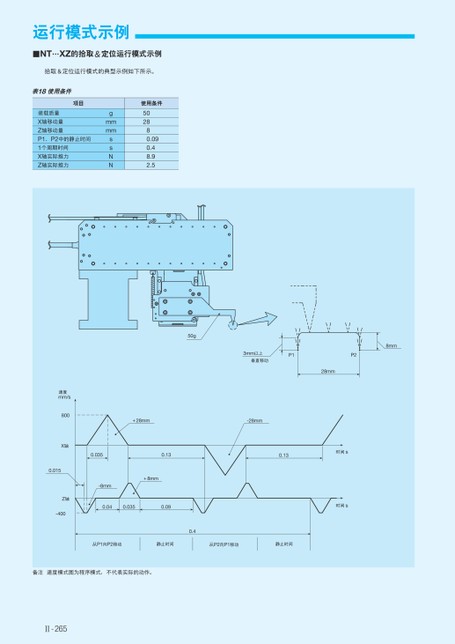
运行模式示例■NT…XZ的拾取&定位运行模式示例拾取&定位运行模式的典型示例如下所示。表21使用条件项目使用条件装载质量X轴移动量Z轴移动量P1、P2中的静止时间1个周期时间X轴实际推力Z轴实际推力gmmmmssNN502880.090.48.92.550g3mm以上垂直移动P128mm8mmP2速度mm/s800X轴0.015Z轴-400+28mm-28mm0.0350.130.13时间s-8mm+8mm0.040.0350.09时间s从P1向P2移动静止时间从P2向P1移动静止时间0.4备注速度模式图为程序模式,不代表实际的动作。Ⅱ-265
 | <
| <  |
|  > |
> |  >>
>>